La chirurgia robotica rappresenta l’ evoluzione tecnologica della chirurgia laparoscopica.
La laparoscopia ha costituito una prima rivoluzione, offrendo al chirurgo la possibilità di eseguire interventi attraverso piccole incisioni anziché una ampia incisione e, al paziente, l’opportunità di un decorso postoperatorio migliore e con una ripresa molto rapida.
La laparoscopia, tuttavia, in contesti di chirurgia complessa, si è rivelata una tecnica difficile da apprendere per i chirurghi e, in alcuni settori, soprattutto nelle esperienze iniziali, con risultati non pienamente soddisfacenti. La chirurgia laparoscopica inoltre richiede al chirurgo posture non confortevoli e che possono causare affaticamento muscolari, specie negli interventi molto lunghi. Questi limiti tecnologici ed ergonomici sono stati superati grazie alla chirurgia robotica.
Inizialmente la chirurgia robotica era stata sviluppata negli anni ‘80 per scopi militari, ma solo nel decennio successivo si è arrivati alla introduzione del primo sistema per utilizzo clinico. E’ però a partire dal 2000 che si può parlare realmente di chirurgia robotica, con la disponibilità di un sistema completo che ha permesso le prime applicazioni in chirurgia generale e specialistica. Oggi la tecnologia disponibile è frutto di numerose evoluzioni e aggiornamenti e diverse aziende si stanno affacciando sul mercato con piattaforme tecnologiche sempre più sofisticate.
L’effetto più evidente della tecnologia è la possibilità di operare con maggiore precisione e con migliore ergonomia per il chirurgo.
Tabella 1 – Confronto elementi di ergonomia e tecnologia
| LAPAROSCOPIA | ROBOTICA | |
| TIPO DI VISIONE | 2D* | 3D stereoscopica |
| CANNULE | 5/10 mm | 5/8 mm |
| STRUMENTI | 3 gradi di libertà | 7 gradi di libertà |
| POSIZIONE OPERATORE | in piedi al tavolo operatorio | seduto alla console |
| CONTROLLI OPERATORE | 2 strumenti operativi | Sistema di visione
3 strumenti operativi |
| CONTROLLI AIUTO | Sistema di visione
1 strumento accessorio |
1 strumento accessorio |
* in alcuni sistemi laparoscopici è possibile simulare una visione 3D polarizzata / attiva
In chirurgia robotica l’operatore rimane seduto su una consolle e controlla un maggior numero di strumenti; il sistema di visione tridimensionale stereoscopica gli consente di percepire la profondità, gli strumenti articolati miniaturizzati permettono di riprodurre su assi di ampia rotazione i movimenti della mano del chirurgo e la stabilità del sistema rende possibili manovre in spazi molto piccoli e stretti.
In sostanza in robotica l’esecuzione di interventi complessi per via mininvasiva risulta più agevole.
La tecnologia inoltre ha la caratteristica intrinseca di essere in continua evoluzione e questo rende ragione della progressiva introduzione di nuovi strumenti e funzioni che rendono possibile un continuo miglioramento delle performance. Gli sviluppi futuri si stanno indirizzando sull’utilizzo di biomarkers integrati nel sistema robotico, realtà aumentata e intelligenza artificiale che rendono già oggi questo settore molto ricco di potenzialità inimmaginabili.
Nello specifico campo della esecuzione dell’intervento di Heller-Dor, per il trattamento della acalasia esofagea, la robotica ha potuto dimostrare i suoi grandi vantaggi in particolare nell’identificazione, isolamento e sezione selettiva delle fibre muscolari circolari dell’esofago, che sono responsabili della malattia, dissociandole dallo strato mucoso più interno che deve essere mantenuto integro. Dalla letteratura scientifica emerge che nelle casistiche di Heller-Dor laparoscopica la perforazione accidentale della mucosa avviene nel 5-16% dei casi, mentre quando l’intervento viene eseguito con tecnica robotica, questo valore scende drasticamente al di sotto del 3%. Qualora dovesse verificarsi, inoltre, la robotica offre la possibilità di suturare il difetto più facilmente.
L’utilizzo della visione a infrarosso e l’utilizzo di un colorante vitale per via endovenosa (verde di indocianina) consentono inoltre di valutare la microperfusione della mucosa e quindi l’assenza di danni termici o meccanici anche microscopici, evitando il conrollo endoscopico intraoperatorio e aiutano a identificare la presenza di fibre muscolari residue che possono essere responsabili di recidiva. Infine, l’agilità e la maneggevolezza della strumentazione rendono molto efficace il confezionamento del meccanismo antireflusso.
In sostanza il sistema robotico è in grado di migliorare tecnicamente l’esecuzione dell’intervento di Heller-Dor, riducendo le complicanze postoperatorie e rendendo più breve la degenza postoperatoria grazie anche ad un precoce ripristino della alimentazione per via orale
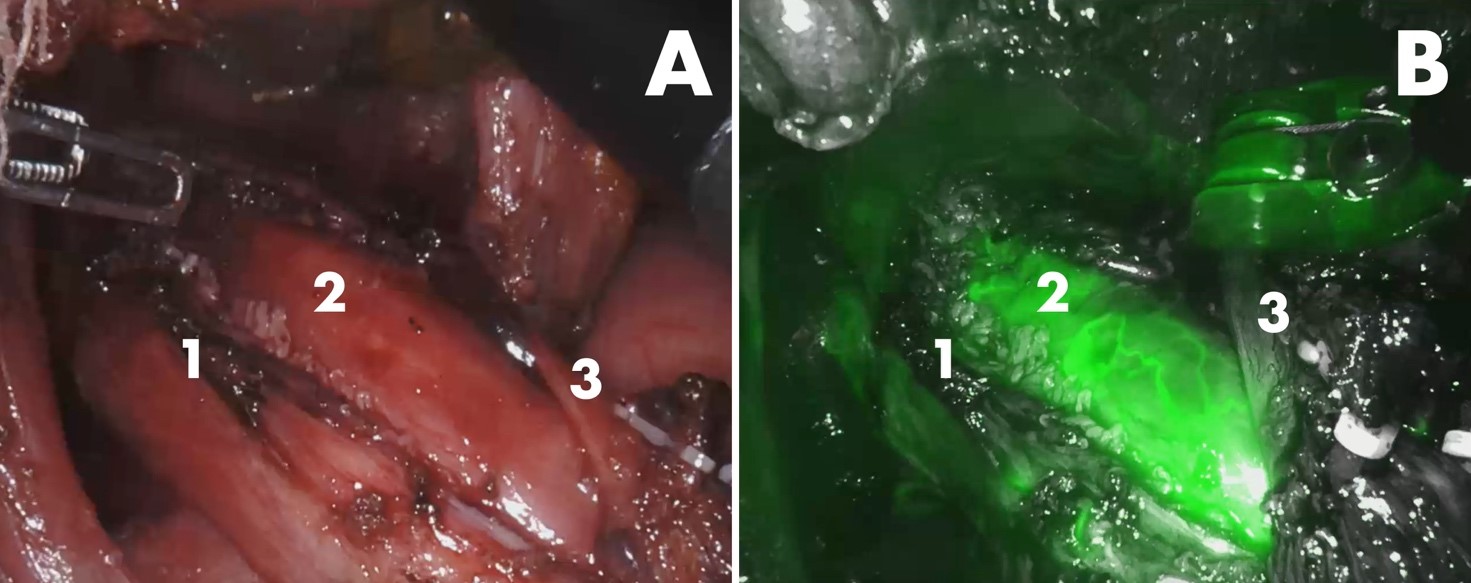
Figura 1 : Immagine intraoperatoria al termine della miotomia: A – luce bianca: 1. Margine della miotomia; 2. Mucosa esofagea; 3. Nervo vago anteriore. B – luce infrarosso con ICG (verde di indocianina): 1. Margine della miotomia; 2. Mucosa esofagea (visibili i vasi e la diffusione del colorante nel tessuto mucoso; 3. Nervo vago anteriore.
 Prof. Graziano Pernazza
Prof. Graziano Pernazza
Ospedale San Giovanni Addolorata, Roma